During my time at the DFKI I have worked on interface and interaction design solutions for robotic applications and participated in academic research. The fields of research I was involved with included space robotics, robotic maritime exploration, and human-robot collaboration for rehabilitation.
Due to a non-disclosure agreement I can only show a small part of my work.
Robotics Innovation Center →
Years: 2018 - 2021
Keywords: Robotic Teleoperation, VR, Eye-Tracking, Hand-Tracking, Unreal Engine, Unity, Leap-Motion, Academic Publication
The project focuses on assembly and installation of infrastructure for space applications by humans and robots either autonomously or in cooperation. The cooperation follows the concept of "sliding autonomy" where robots can work either autonomously e.g. to support on-site astronauts or be teleoperated from a distance by an
operator using an exoskeleton to translate body movements to the robot.
My task was to create interface design principles for a virtual reality interface that operators use to
control
robotic systems, access on-site information and immerse themselves in a virtual representation of the
environment that the robot captures from its surrounding.
Due to the complex nature of such an endeavour the interface design had to prioritize unobtrusiveness while
containing a wide array of functionalities as well as being dynamically adaptable to unforeseen tasks and
environments.
Project
TransFit →
That's me using an omnidirectional treadmill to freely move around a virtual reality environment that I created for project TransFit to serve as a teleoperation interface for human-robot collaboration on the moon. The exoskeleton from the Recupera REHA Project → is used to teleoperate the humanoid robotic system on the site
Authors: Luka Jacke, Michael Maurus, Prof. Dr. Elsa Andrea Kirchner
See publication →Prototype made with: Unreal Engine, HTC Vive, Leap Motion
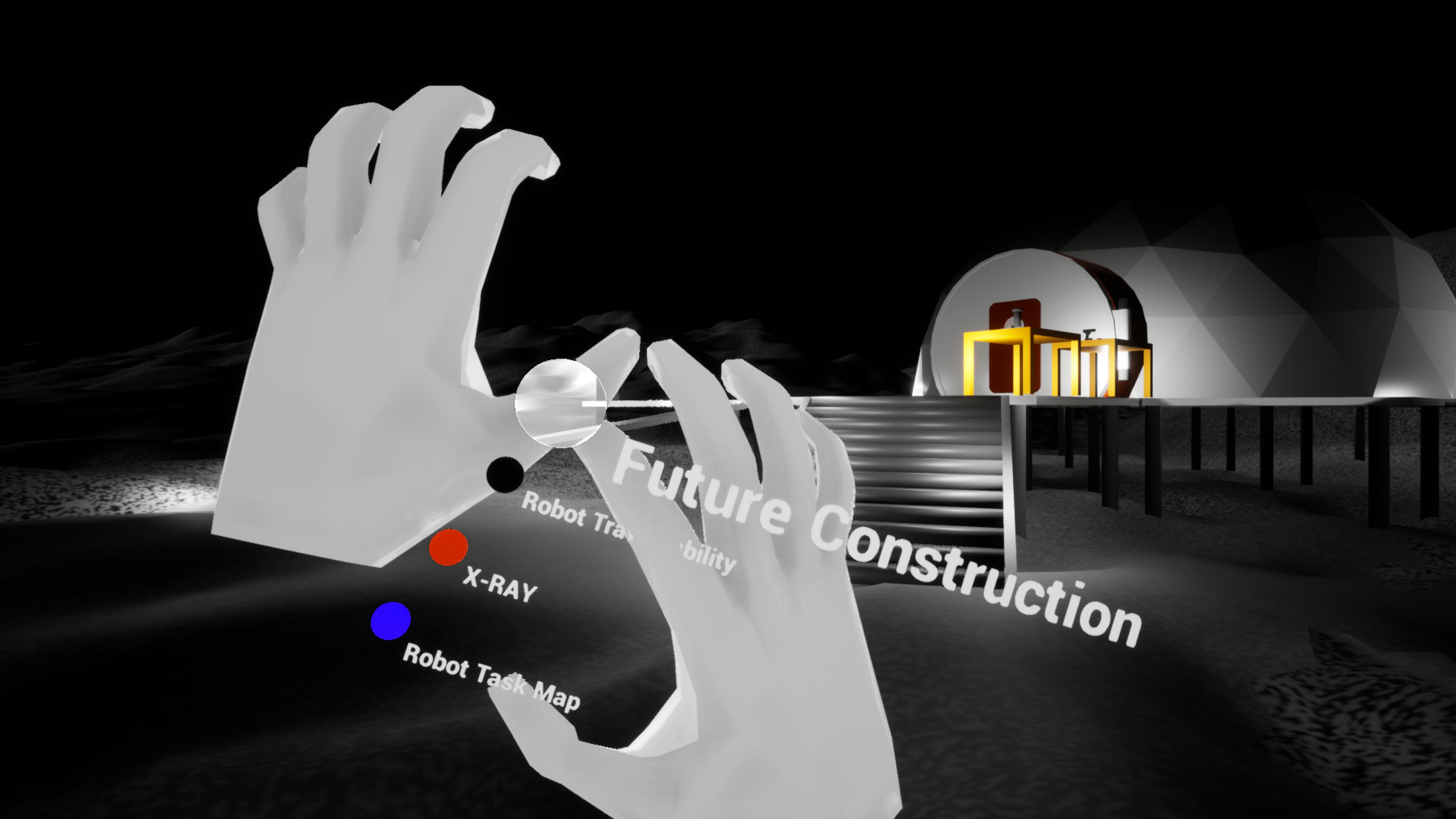
To access information layers, augmentation glasses can be drawn from a stack. This is supposed to work naturally - glasses would be picked up from the stack and simply dropped back after use. For the presentation of our first prototype, glasses can be selected with the index finger using a Leap Motion hand tracking controller.
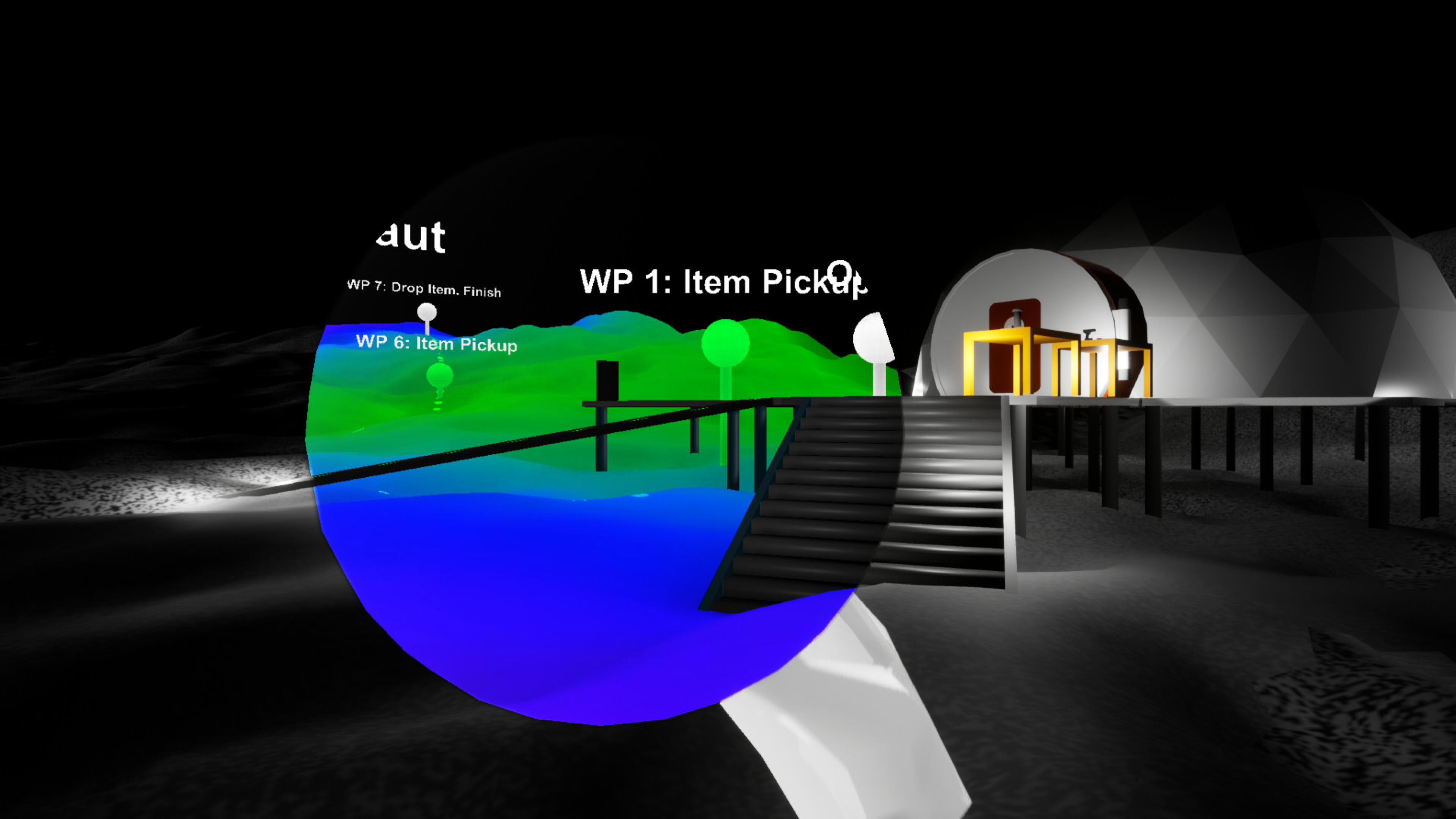
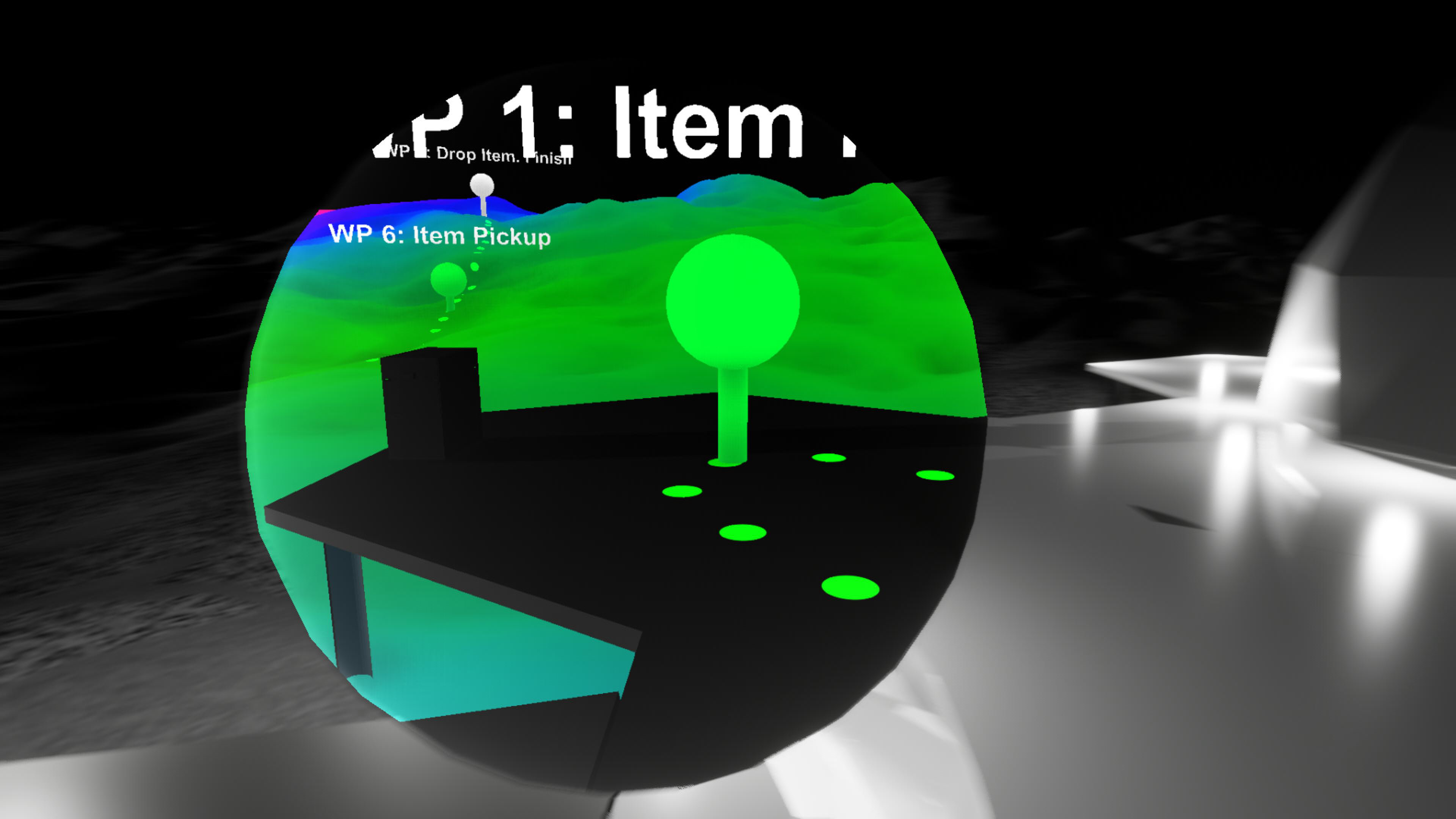
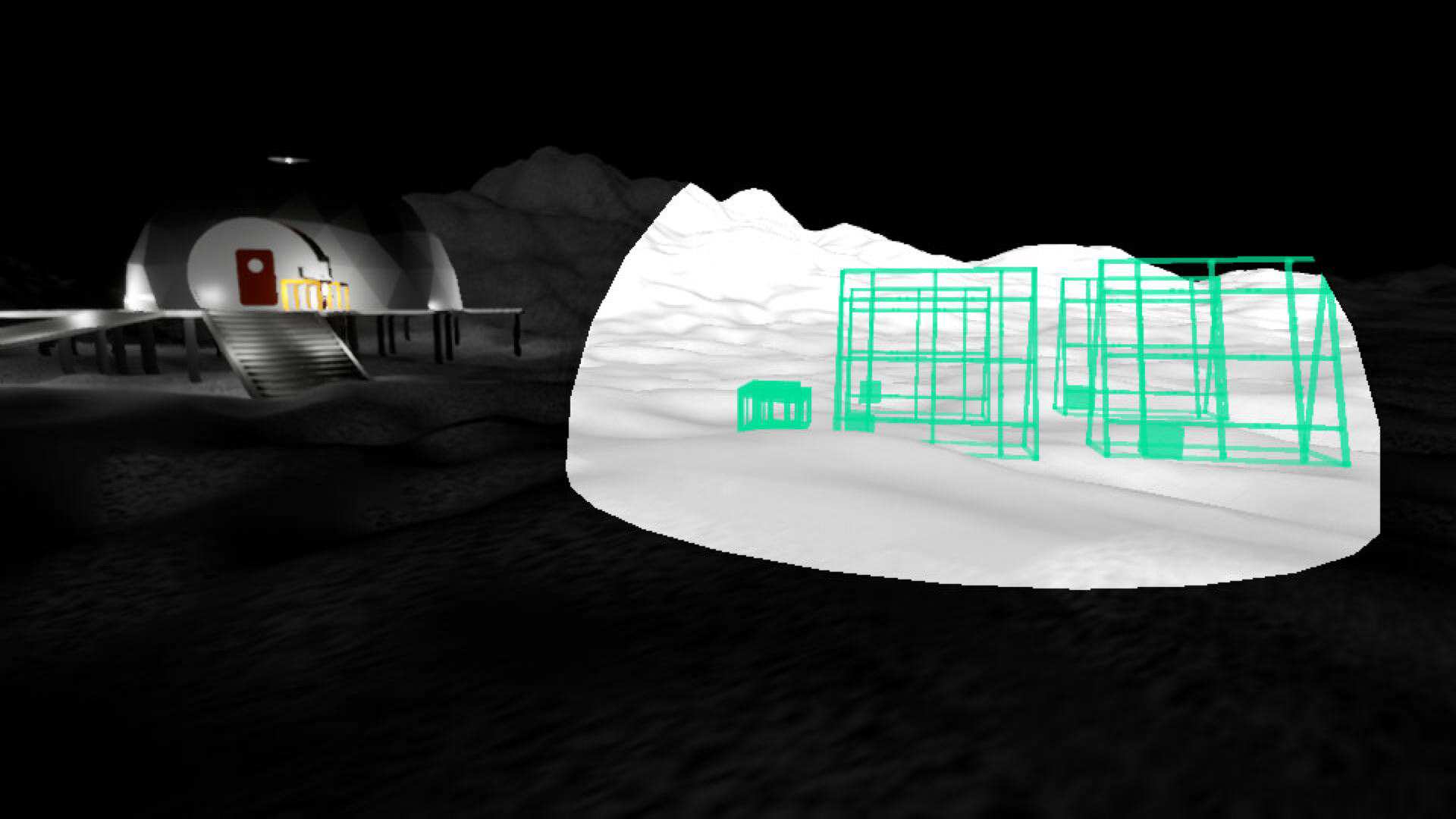
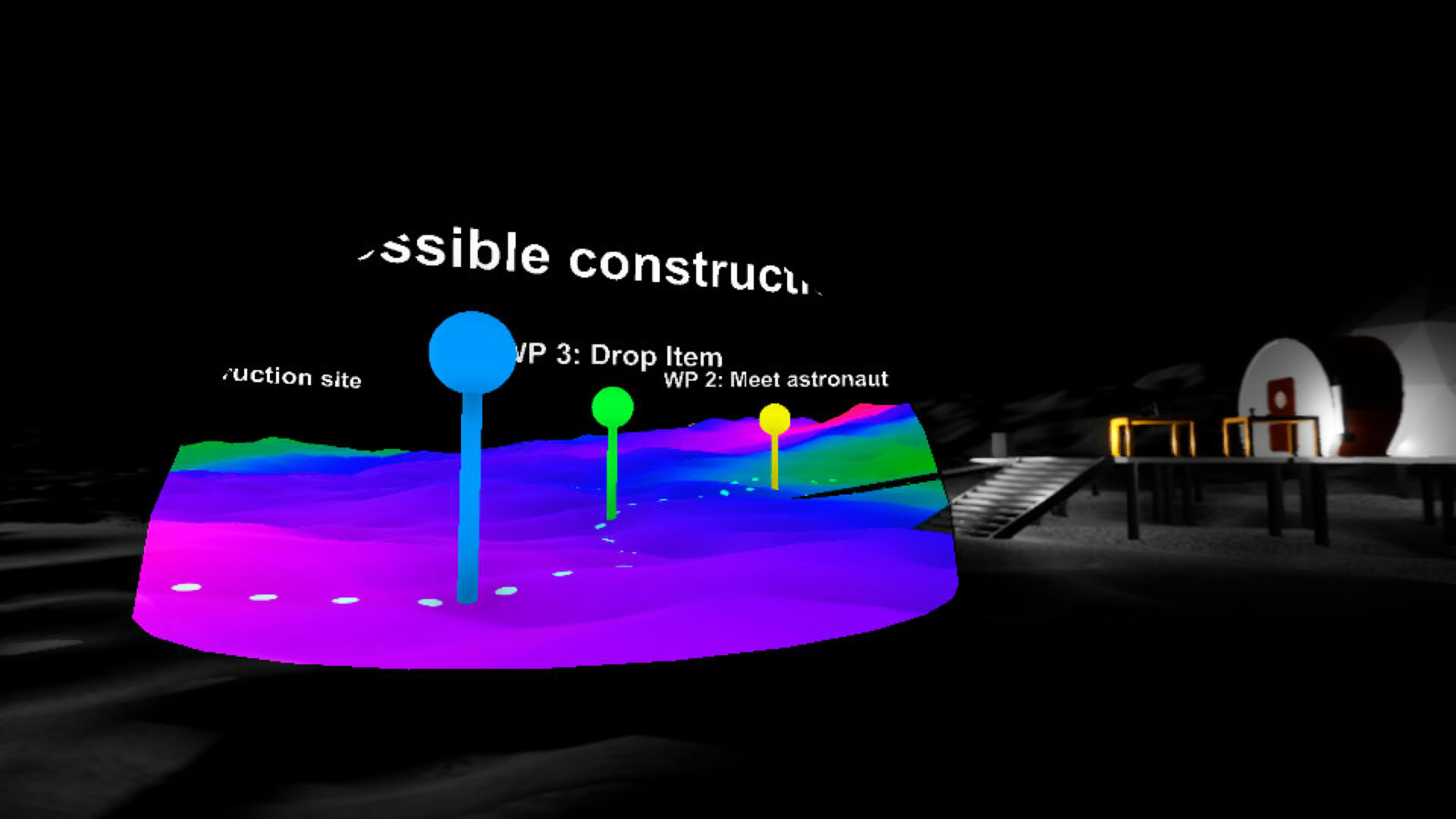
An augmentation glass is used to quickly access the robot task route and a traversability map
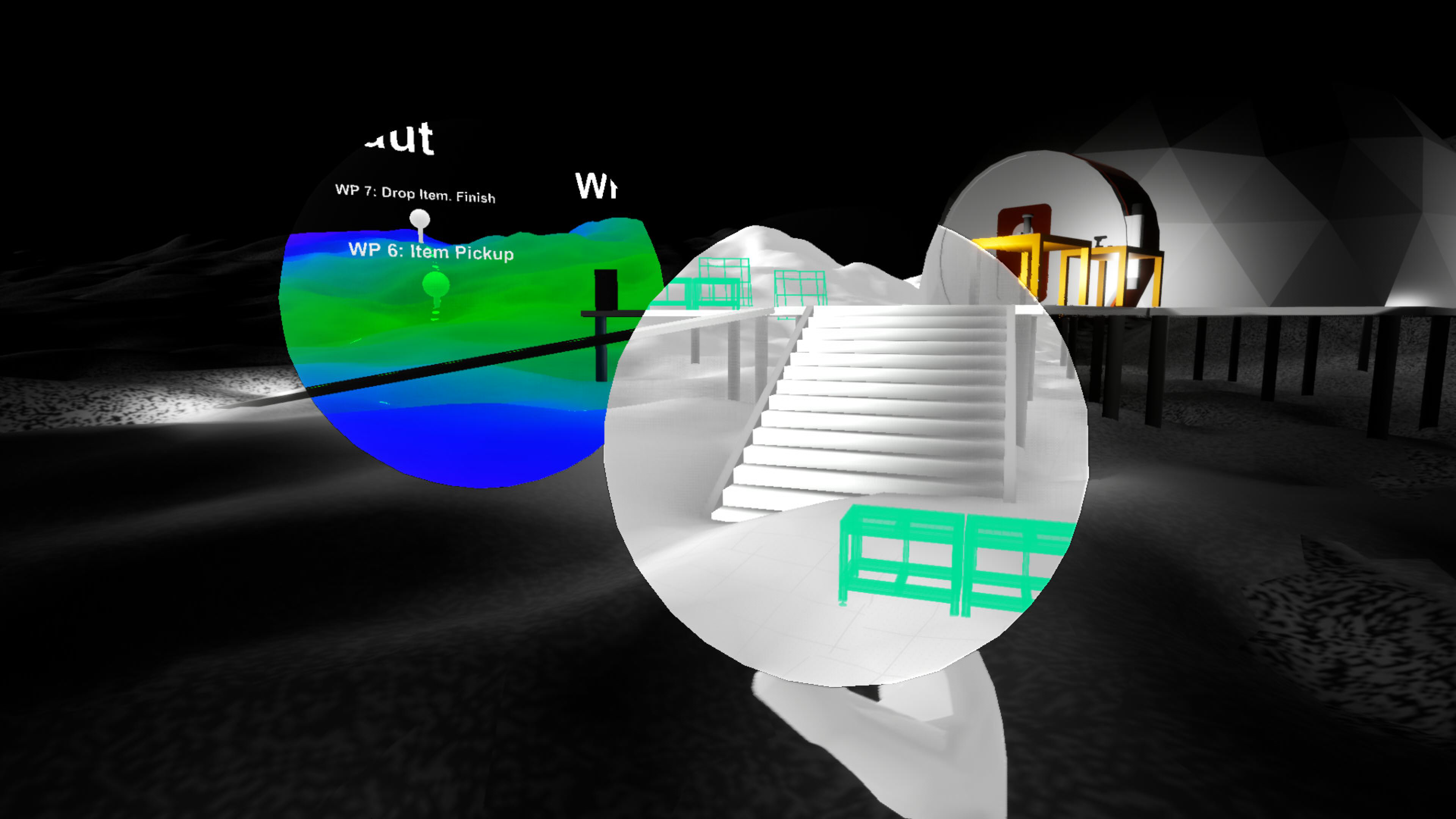
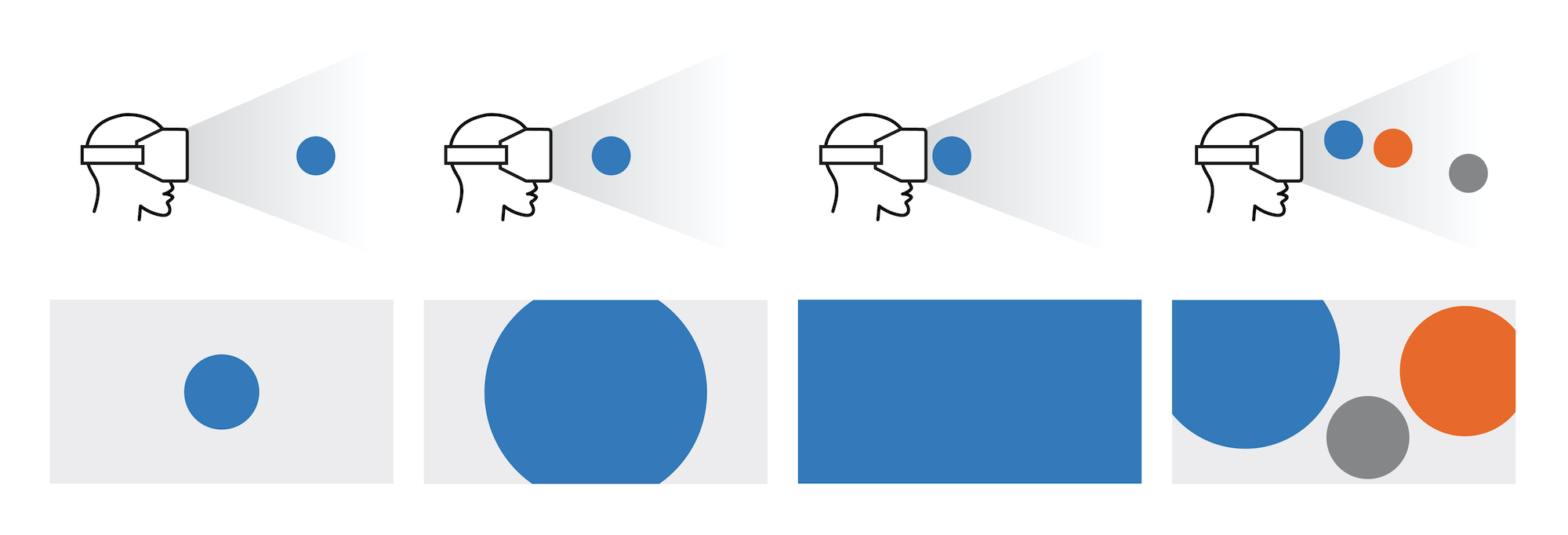
Multiple augmentation glasses can be used side by side

Augmentation glasses can be positioned into the virtual environment for collaborative use